1、PID調(diào)節(jié)器基本原理及仿真研究
1.1 PID參數(shù)整定的基本方法
調(diào)節(jié)器PID參數(shù)整定方法可以分為時域整定和視屏整定兩大類。時域方法中最基本的是Ziegler和Nichol提出的Z-N階躍響應法。在實際的應用中傳統(tǒng)的Z-N整定方法有著多種類型,最常見的有Cohen.Coon法和CHR法。其中CHR方法就是通過改變階躍響應以得出較好的閉環(huán)特性的一種方法。
1.2 仿真實例
為了改善系統(tǒng)的性能,在系統(tǒng)中引入形如:
 的串聯(lián)校正網(wǎng)絡,以改善系統(tǒng)的閉環(huán)極點。但是,Gc同時也會在系統(tǒng)閉環(huán)傳遞函數(shù)中增加一個新的零點。這個新增的零點肯定會嚴重影響閉環(huán)函數(shù)的動態(tài)性能。此時要考慮在系統(tǒng)的輸入串接一個前置濾波器,以消除新增閉環(huán)零點的不利影響。
的串聯(lián)校正網(wǎng)絡,以改善系統(tǒng)的閉環(huán)極點。但是,Gc同時也會在系統(tǒng)閉環(huán)傳遞函數(shù)中增加一個新的零點。這個新增的零點肯定會嚴重影響閉環(huán)函數(shù)的動態(tài)性能。此時要考慮在系統(tǒng)的輸入串接一個前置濾波器,以消除新增閉環(huán)零點的不利影響。設帶有前置濾波器的控制系統(tǒng)乳圖1所示,被控對象為
 ;校正網(wǎng)絡為PI調(diào)節(jié)器,前置濾波器為
;校正網(wǎng)絡為PI調(diào)節(jié)器,前置濾波器為 ;系統(tǒng)的設計主要為:①系統(tǒng)阻尼比為0.707;②階躍響應的超調(diào)量≦5%;③階躍響應的調(diào)節(jié)時間≦ 0.6s。
;系統(tǒng)的設計主要為:①系統(tǒng)阻尼比為0.707;②階躍響應的超調(diào)量≦5%;③階躍響應的調(diào)節(jié)時間≦ 0.6s。框圖")
圖1 帶前置濾波器的控制系統(tǒng)框圖
試設計K1、K2及前置濾波器。
解:根據(jù)圖1系統(tǒng)框圖可得系統(tǒng)的閉環(huán)傳遞函數(shù)為
 ;系統(tǒng)的閉環(huán)傳遞函數(shù)為
;系統(tǒng)的閉環(huán)傳遞函數(shù)為
根據(jù)系統(tǒng)對阻尼比和調(diào)節(jié)時間的要求,令阻尼比為0.707,且由ts<0.6s
可求得ξWn≧7.33。取ξWn =8,故Wn=11.312.于是求出PI控制其參數(shù)為:
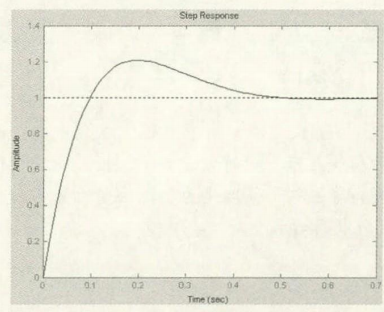
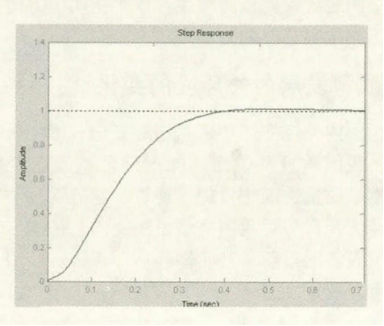
 ;于是,無前置濾波器時,系統(tǒng)的上升時間為0.07s,峰值時間為0.2s,超調(diào)量為20.2%,調(diào)節(jié)時間為0.54s。顯然,由于新增的零點的影響,超調(diào)量無法滿足要求。
;于是,無前置濾波器時,系統(tǒng)的上升時間為0.07s,峰值時間為0.2s,超調(diào)量為20.2%,調(diào)節(jié)時間為0.54s。顯然,由于新增的零點的影響,超調(diào)量無法滿足要求。考慮采用前置濾波器Gp(s)來對消閉環(huán)傳遞函數(shù)中的零點,并同時保持系統(tǒng)原有的直流增益不變,為此取
 ;閉環(huán)傳遞函數(shù)變成
;閉環(huán)傳遞函數(shù)變成
上升時間為0.29s,峰值時間為0.39s,超調(diào)量為4.3%,調(diào)節(jié)時間為0.55s
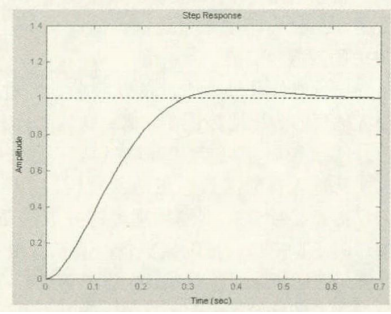
以上圖形基于Z-N參數(shù)整定的方法來仿真的,根據(jù)設定函數(shù)的零極點,來抵消需要校正函數(shù)的零極點,從而達到設計的要求。此種方法簡單、方便,通常用于要求精度不高的調(diào)節(jié)器中。
2、基于遺傳算法的PID參數(shù)整定
2.1 遺傳算法
2.1.1 編碼與譯碼
遺傳算法最常用的編碼方法是二進制編碼法,假設某一參數(shù)取值范圍為[A,B],用長度h的二進制編碼串來表示該參數(shù),[A,B]將等分成2h-1個子部分,則它能產(chǎn)生2h種不同的編碼。上述二進制編碼所對應的編碼公式為:
 ,
, 
2.1.2 適應函數(shù)
為了體現(xiàn)染色體的適應能力而引入的對問題中的每一個染色體都能進行度量的函數(shù)叫適應度函數(shù)。通過適應度函數(shù)來決定染色體的優(yōu)劣程度,它體現(xiàn)了自然進化中的優(yōu)勝劣汰原則。
2.1.3 選擇
選擇又稱為復制,是在群體中選擇生命力強的個體產(chǎn)生下一代群體的過程。遺傳算法使用選擇算子來對種群中的個體進行選擇操作;根據(jù)每個個體的適應度大小來進行選擇適應度高的被遺傳到下一代的概率較大,適應度小的被遺傳到下一代的概率就小。選擇操作的目的是為了避免有用的遺傳信息的丟失,提高全局收斂性和計算效率。確定一個好的選擇算子,能提高搜索的全局性,避免早熟。
2.1.4 交叉、變異
基本的遺傳操作主要由3種:選擇、交叉、變異。選擇操作也叫復制操作,根據(jù)個體適應度函數(shù)值所度量的優(yōu)劣程度決定它在下一代是被淘汰還是被遺傳。一般地說,選擇將使適應度較大的個體有較大的存在機會,而適應度較小的個體繼續(xù)存在機會也較小。
2.2 遺傳算法對PID參數(shù)整定的實例
PID調(diào)節(jié)器的三個參數(shù)Kp、Ki、Kd進行二進制編碼,其中Kp?(0.1,20),Ki?(0,2),Kd?(0,2)每個參數(shù)的長度取14為,3個參宿一次串接,形成一個個體,個體長度為L=42,種群大小取n=30.選擇算法采用常用的賭輪算法。交叉概率一般取0.4-0.9,本實例中取Pc=0.7,變異概率取0.0001-0.1,本實例Pc=0.01,收斂代數(shù)取迭代300次結(jié)束。遺傳算法尋優(yōu)得:Kp=4.8651,Ki=0.4252,Kd=0.6355
上升時間:0.50s;超調(diào)量為1.23%
遺傳算法對于多變、目標函數(shù)不可微或不確定問題解的尋優(yōu),比傳統(tǒng)的優(yōu)化方法有更廣泛的適應性。仿真結(jié)果表明遺傳算法應用于PID調(diào)節(jié)器參數(shù)優(yōu)化方法。
智能控制的發(fā)展日新月異,結(jié)合調(diào)節(jié)器新的控制算法,例如神經(jīng)網(wǎng)絡、遺傳算法、專家控制方式等,把它們運用到傳統(tǒng)PID控制中,已獲得適應非線性、時變不確定性,并于難以建立精確的數(shù)學模型的復雜控制環(huán)境中獲得大大優(yōu)化于傳統(tǒng)PID控制的動態(tài)性能和穩(wěn)態(tài)性能;像遺傳算法和PID相結(jié)合的自適應PID控制以及模糊神經(jīng)網(wǎng)絡和PID相結(jié)合的PID控制方式都是研究的重要方向。
PID調(diào)節(jié)器因為結(jié)構(gòu)簡單、容易實現(xiàn),并且具有較強的魯棒性,因而被廣泛應用于各種工業(yè)過程控制中。盡管已經(jīng)出現(xiàn)多種先進控制方法,PID控制仍然在各種工業(yè)控制技術(shù)中占據(jù)主導地位。PID調(diào)節(jié)器參數(shù)整定優(yōu)劣與否,是以其能否在實用中得到好的閉環(huán)控制效果為前提條件的。迄今為止,各種先進PID調(diào)節(jié)器參數(shù)整定方法層出不窮,但在實際應用中,這些先進的整定方法并沒有像預期的那樣產(chǎn)生完美的控制效果。這主要是因為PID調(diào)節(jié)器結(jié)構(gòu)上的簡單性決定了它在控制品質(zhì)上的局限性,并且這種簡單性使得PID調(diào)節(jié)器對大時滯、不穩(wěn)對象等被控對象的控制性能不是很好,同時PID調(diào)節(jié)器無法同時滿足對設定值跟蹤和抑制外擾的不同性能要求。本文提出的遺傳算法在一定程度上改進了PID調(diào)節(jié)器性能指標。