調頻連續波雷達普遍用于儀表行業物位測量和汽車行業的自動駕駛,昌暉儀表在本文分享調頻連續波雷達的基礎知識供大家學習。
1、調頻連續波概括
FMCW:調頻連續波,有時也可以寫成LFMCW或者Linear FMCW。現在普遍用于儀表行業雷達物位計和汽車雷達這一行業里,它的發射信號頻率隨著時間線性變化(也就是我們平常所說的chirp),下圖是FMCW的鋸齒波形式,圖中的各種變量昌暉儀表會在后面進行具體的解釋。

FMCW雷達的優點在于具備掃描寬的RF(射頻)帶寬(GHZ)的同時還能夠保持小的IF(中頻、差頻或拍頻)帶寬(MHz)。FMCW雷達優點還有具備高的距離分辨率(例如,在RF帶寬為2GHz時距離分辨率達到7.5cm,同時IF仍然可以保持在15MHz以下)。
2、FMCW系統模型
2.1 發射信號模型
下圖紅色虛線圈住的部分是發射系統:
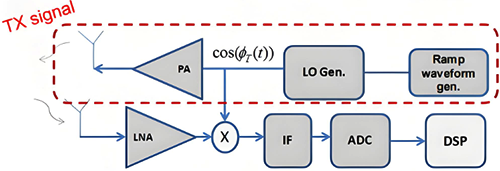
發射信號的波形(chirp):

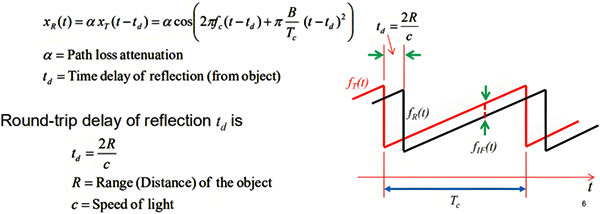
其中B是chirp的掃描帶寬,Tc是chirp周期。另外,FMCW波形的瞬時頻率可以表示為下圖所示公式

2.2 接收信號模型

接收信號是發射信號經過衰減和延時得到的,下式中得td就是表示的這個延時時間,α為路徑衰減。
2.3 中頻信號模型
下圖紅色虛線部分是中頻系統:
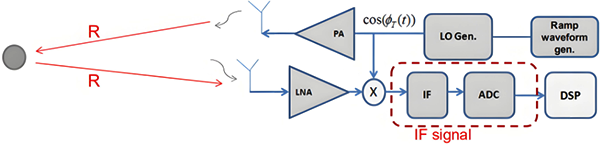
經過混頻器后得到中頻信號(拍頻):
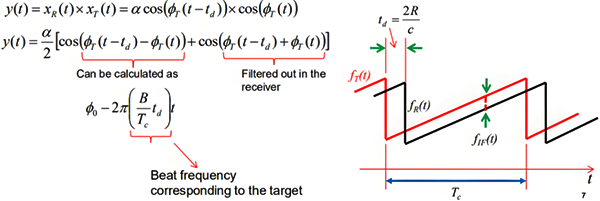
中頻頻率為fIF=B×td/Tc。
3、FMCW雷達是如何工作?
3.1 靜止目標
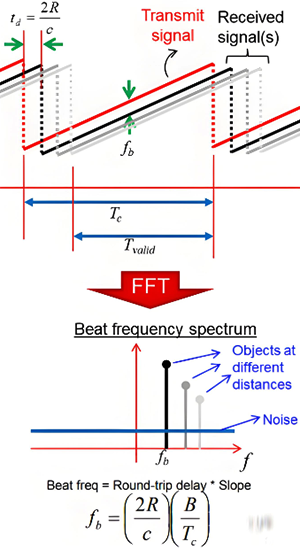
對于靜止目標,中頻僅與距離(回波的往返延遲)是成比例的。對于FMCW的中頻fb來說它等于調頻斜率(B/Tc)乘以往返時間td。對于多個目標,中頻信號是由多個目標的對應的多個中頻組成的,其中每個中頻與目標的距離成比例關系,并且這些中頻對應不同目標的距離。物體檢測和距離(范圍)估計通常是通過對接收的中頻信號做FFT得到的。
補充一點關于中頻信號的知識:對于雷達前方的單個物體,IF信號的頻率與物體的距離成正比,它的起始相位具有隨物體距離微小變化Δd以線性變化的性質,公式如下(中頻頻率上圖已經給出,下面給出相位與距離的公式):
Δφ=4pi×Δd/λ
該如何理解物體位置發生微小變化Δd,該中頻信號的頻率和相位如何變化。假設B/Tc=50MHz/us,Tc=40us。
①首先是相位變化:對于77GHz雷達1毫米實際上對應于波長的1/4,因此位置改變1毫米,相位變化Δφ=4pi×(λ/4)/λ=pi。
②其次頻率變化Δf=(B/Tc)×(2×λ/4)/c,計算可得最后頻率變化了333Hz,333Hz在Tc=40us的觀察窗中,僅對應0.013個周期,該頻率變化無法識別。
3.2 運動目標
對運動目標來說,速度是由多個chirp的相位變化得到的。第n個chirp的差拍信號的相位和頻率可寫成如下的形式:

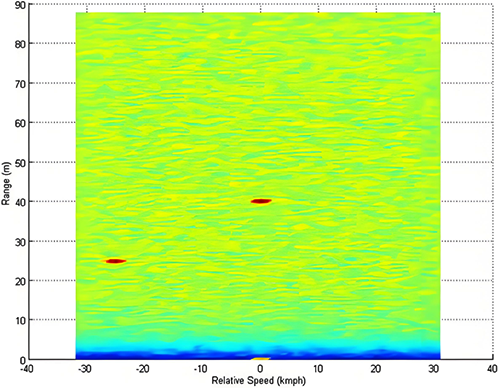
從1可以看出chirp之間的相位變化僅取決于速度(與距離無關),之后經過對chirp進行2D-FFT處理之后,來確定相位變化,從而來確定速度。二維FFT的過程給出了距離速度圖像,如圖所示。
4、角度估計(波束合成技術(Beamforming))
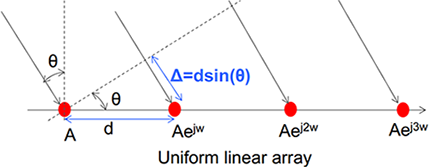
下圖是一個均勻四天線的線性陣列,相鄰天線的波程差(Δ)取決于到達角θ。
Δ=dsin(θ)
其中波程差導致了相鄰天線之間的相位(ω)發生變化。(個人覺得這樣寫更好理解,因為2π對應一個波長λ,波程差除以波長λ表示這段波程差包含了多少個波長,然后再乘以2π,就得到了對應的相位。)
ω=2π*(dsin(θ)/λ)
相位變化可以用FFT(3DFFT)來估計(West),當得到估計的w,到達角(θ)就可以很容易得到。
5、FMCW雷達處理流程
FMCW雷達信號處理中典型的處理流程如下:

典型的FMCW chirp配置由一系列chirp和空閑時間組成,如下圖所示,一幀時間約為40ms,由有效傳輸時間和幀間空閑時間兩部分組成,其中第一部分是chirp的有效傳輸時間(10~15ms),第二部分是幀間傳輸時間(最長大概在25ms~30ms),其中1DFFT是在第一部分完成的;2DFFT,3DFFT和當前幀檢測是在第二部分完成的。CFAR和其他常用于檢測的算法也是在這一部分完成的。

6、快速FMCW調制的優點
在許多傳統的系統中經常使用慢速FMCW波形,也就是所說的三角波,調頻持續時間為毫秒級而不是微秒級。慢速FMCW的優點在于對DSP MIPS要求低,不用進行2DFFT處理。但是存在模糊的問題,并且沒有好的方法可以獲取距離-多普勒圖,對于探測范圍和多普勒效應的討論也和鋸齒波相類似。
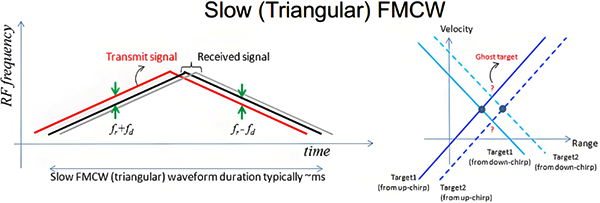
但是一旦探測目標為多個,產生了不同的拍頻信號,我們很難得知拍頻信號和探測物體之間的對應關系,也就沒辦法進行準確的探測。如下圖所示,如果只有一個探測目標1,目標位置可以通過[Δf2]1和[-Δf1]1算得出,即兩條直線的交點;但是如果此時存在兩個目標,則會產生四個交點,其中兩個就是不存在的目標點,這時需要進行目標匹配,上面這些是大佬的解釋。

可以看出兩個幽靈目標其實是下圖中目標1(上升chirp圖中的③)與目標2(下降chirp圖中的①)以及目標1(下降chirp圖中②)與目標2(上升chirp圖中的④)。是由不同目標的上升chirp與下降chirp交織導致的。
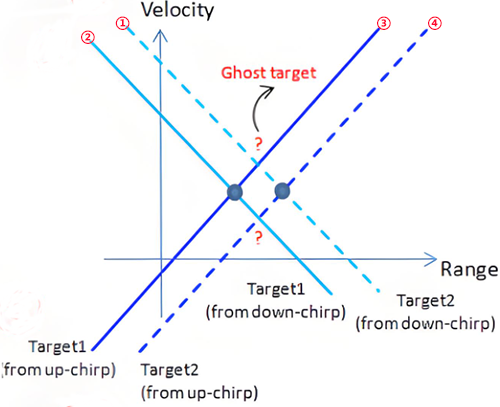
現在的雷達系統中通常首選快速FMCW波形,就是鋸齒波,快速FMCW能夠提供物體的距離-多普勒二維圖,并不存在幽靈目標,如下所示:

7、雷達關鍵參數
雷達的關鍵指標參數主要有最大距離、距離分辨率、距離精度、最大速度、速度分辨率、速度精度、探測范圍、角度分辨率和幀周期。下圖比較生動的展示了這些指標。

7.1 最大距離
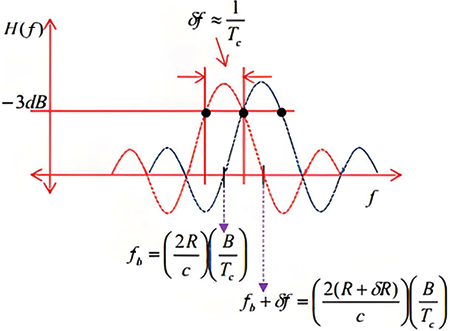
這篇文章采用的計算距離的公式是基于弗里斯傳輸方程(Friis transmission equation):
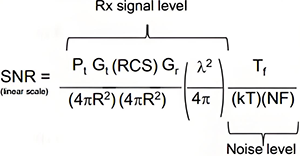
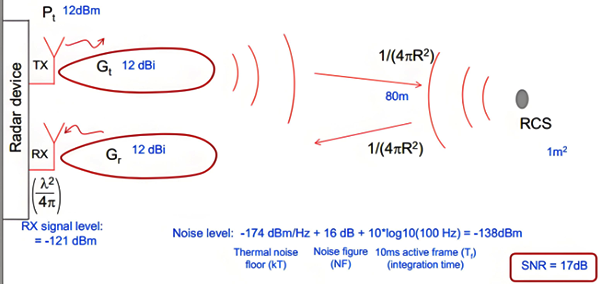
雷達收發電磁波的物理模型如下圖所示,其中要確定發射功率Pt=12dBm,也就是說Pt=12dBm-30dB=-18dB(這個地方是dBm編變成了dB)。Gt=Gr=12dBi,Rmax=80m,SNR=17dB,RCS=1m^2,噪聲系數NF=16dB。
噪聲電平(Noise level):-174dBm/Hz+16dB+10×log10(100Hz)=-138dBm。
注意:Pdbm(kT0)=1.38×10^(-23)J/K×290K×10^3=-174dBm,信號功率測量通常用dBm(分貝相對于1毫瓦)表示,其中的因數1000的出現是因為功率是用毫瓦表示的,而不是瓦。
上述這些參數都需要知曉其物理意義,以及計算方式。
在了解這些之后我們可以得到一個距離和SNR的公式:
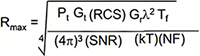
最大距離取決于公式中的這些變量。具體如下表所示,另外RX陣列波束形成增益需要另外計算:

SRR、MRR、LRR其對應的水平FOV俯仰FOV,以及天線增益在下表中給出。同時列出了幾個目標的RCS。
由經驗可以得知:15%的距離損失會引起3dB的SNR損失,50%的距離損失會引起12dB的SNR損失 。
7.2 距離分辨率和距離精度
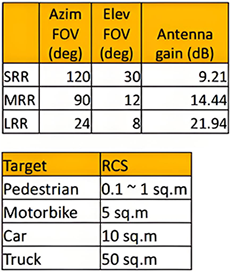
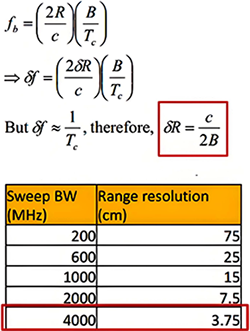
首先明白一點,距離分辨率是在距離維上能夠將兩個距離很近的目標區分開的能力。而距離精度是單個目標測距精度這一點要區別開。關于距離分辨率這個我們先看圖,圖中的-3dB指的是3dB帶寬。
fb和fb+δf是兩個目標的中頻頻率,其實距離分辨率就是求得圖中的δf,推導過程如下所示,總得來說,其實距離分辨率就是一個RF(射頻帶寬B)的函數,大家可以自己求一下看看是不是表中的這個情況。
而距離精度通常是距離分辨率的一小部分,它跟信噪比有關。公式如下:
7.3 最大速度
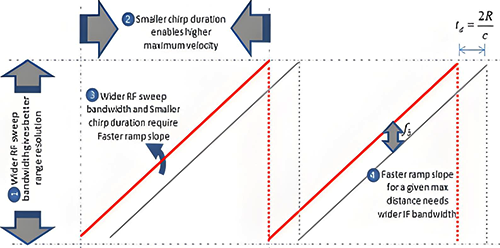
在快速調頻連續波(FMCW)調制中的最大無模糊速度取決于線性調制周期-更高的速度需要更陡的斜坡。最大速度的公式如下,λ是波長,Tc是chirp持續時間(包含chirp間時間):

對于給定的最大距離和距離分辨率,較高的最大速度需要較高的中頻帶寬。三者關系如下所示,這三個參數是相互矛盾的關系。距離分辨率要高,那帶寬就要大,但是帶寬變大,最大距離就會受到限制,如果調頻斜率不變,帶寬變大會引起調頻周期變長,引起最大不模糊速度降低。
高級的算法技術通常用于增加最大速度不模糊度,用于將混疊速度解析為真實的速度。速度模糊就是速度混疊,原因就是速度采樣率太低,也就是Tc的時間太長。
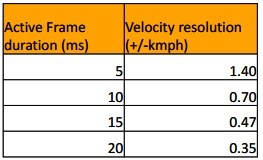
7.4 速度分辨率與速度精度
速度分辨率與速度精度的區別和距離分辨率與距離精度一樣,速度分辨率是在速度維能夠區分兩個目標的能力,而速度精度是一個目標在速度上的測量精度。前面我們知道距離分辨率取決于RF的帶寬,距離精度取決于SNR。那么速度分辨率和速度精度由什么來決定的呢?我們接著往下看。
首先我們先看一下速度分辨率的公式:

N為一幀中chirp的數量,Tc上面也提到過是chirp周期(包含幀間時間)。由因為幀周期=N*Tc。那么速度分辨率主要取決于誰就能一眼看出來(速度分辨率與幀時間成反比)。
然后我們看一下速度精度的公式:
它其實和距離分辨率一樣也是取決于SNR ,同樣速度精度通常也是速度分辨率的一部分。另外給出一個速度分辨率和幀周期的表格。大家可以按照這個計算一下練練手。
7.5 角度分辨率
其實除了角度分辨率外,還有一個角度范圍(FOV),但這個跟天線有關系。后面我學習了之后再跟大家分享。先看看角度精度吧。
同樣角度分辨率與速度、距離分辨率一樣,都是將至少兩個目標區分開。只不過角度分辨率是通過角度來區分的。
雷達傳感器與激光雷達相比,角度分辨率很差。那為啥要用它呢?原因是在距離和速度方向上有很好的分辨率。下面我們給出一個K 個陣列的角分辨率(以弧度為單位)的公式:

從公式可以看出來,當θ=0時,分辨率是最佳的,可以從下面的圖中直觀的看出,角度越大,分辨單元就越大。
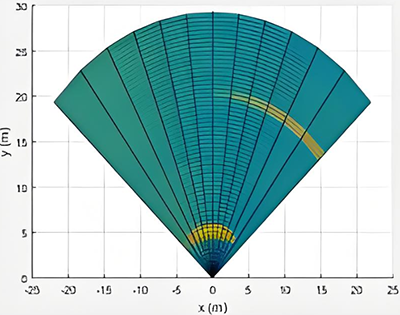
通常我們在計算角度分辨率的時候會假設d=λ/2,θ=0。所以我們通常意義上的角度分辨率計算都是通過這個公式得到的:δθ=2/K
同樣給出一個角度分辨率和陣列個數的表格供大家參考。
到這基本上關于調頻連續波雷達的基礎知識算是分享完了。